State space search is a core technique in artificial intelligence, enabling the exploration of possible states to find solutions. By modeling problems as states and transitions, AI systems can solve complex tasks like puzzle-solving, robotics, and planning through systematic search strategies that efficiently navigate toward the goal state.
Understanding State Space Search
State space search refers to the process of navigating through a set of possible states that represent different configurations of a problem. Each state corresponds to a specific condition of the problem, and transitions between states represent the actions taken to move from one configuration to another. The initial state is where the problem starts, and the goal state is the solution or desired outcome.
In state space search, the objective is to find a sequence of actions that transitions the system from the initial state to the goal state, following a path through the state space. Problems are modeled as a search process, where each node in the search tree or graph represents a state, and the edges between nodes represent the transitions or actions.
Real-World Examples
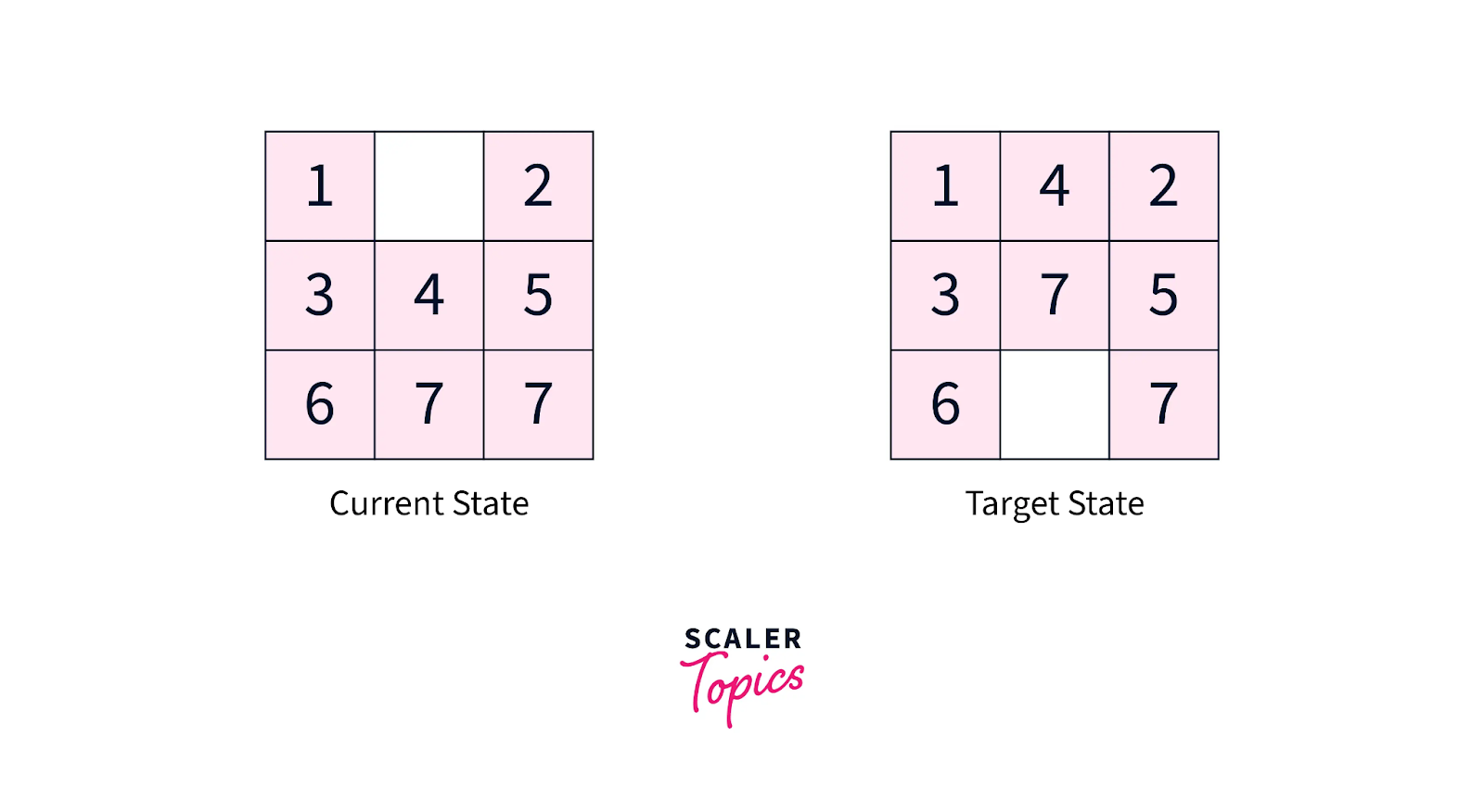
- Puzzle solving: Problems like the 8-puzzle or Rubik’s cube are classic examples where state space search is used to find the optimal sequence of moves.
- Robotics: A robot navigating through a maze can be modeled as a state space search problem, where each state represents the robot’s position, and the transitions represent its movement from one point to another.
State space search forms the backbone of many problem-solving techniques in AI, offering a structured way to explore potential solutions.
Principles and Features of State Space Search
State space search relies on several key principles and features that define how problems are approached and solved in AI:
1. Initial State
- The initial state is the starting point of the problem, where the system begins its search for a solution. This is often the default configuration of the system before any actions have been taken.
2. Goal State
- The goal state is the desired end result that the system aims to reach. In AI problem-solving, finding a path from the initial state to the goal state is the main objective of the state space search process.
3. Transitions
- Transitions are the actions or operations that move the system from one state to another. These can be physical movements (in robotics) or logical actions (in puzzle-solving), depending on the nature of the problem.
4. Path Costs
- The path cost refers to the cumulative cost of reaching a particular state from the initial state. In some state space searches, minimizing the path cost is important, as it ensures that the most efficient solution is found.
5. State Space Representation
- State space can be represented either as a graph or a tree, where nodes correspond to states and edges correspond to transitions. Tree representations are useful for problems without loops, while graph representations handle situations where states may be revisited.
Steps in State Space Search
The steps involved in state space search are as follows:
Step 1: Define the State Space
The first step in state space search is to define the state space clearly. This involves identifying all possible states the system can be in and the transitions between these states. For example, in the 8-puzzle problem, each configuration of the puzzle represents a state, and moving a tile constitutes a transition. Defining the state space accurately is critical for setting up the search process.
Step 2: Pick a Search Strategy
The next step is to choose an appropriate search strategy. There are two main categories: uninformed search and informed search. Uninformed search strategies like breadth-first search (BFS) and depth-first search (DFS) explore the state space without prior knowledge, while informed search strategies like A* use heuristics to guide the search toward the goal state. The choice of strategy depends on the problem and the computational resources available.
Step 3: Start the Search
Once the state space and search strategy are defined, the search begins from the initial state. The system starts exploring the possible states based on the selected search strategy. The search can either proceed by expanding all nodes at each level (in BFS) or exploring a path to its depth (in DFS).
Step 4: Extend the Nodes
During the search, each node is expanded by generating its successor states. These successor states represent the next possible configurations after an action is taken. The search process continues by adding these nodes to the frontier or open list, which tracks all unexplored nodes.
Step 5: Address State Repetition
In large state spaces, it is common to encounter repeated states. To avoid exploring the same state multiple times, it is crucial to maintain a closed list of visited nodes. This prevents the search from wasting resources on redundant paths and ensures a more efficient search process.
Step 6: End the Search
The search concludes when the goal state is reached or when all possible states have been explored. If the search successfully finds the goal state, it returns the path that led to the solution. Otherwise, the system may determine that no solution exists within the defined state space.
State Space Representation
State space search problems can be represented in two main forms: tree representations and graph representations. Both are used to visualize the states and transitions between them, but their use depends on the nature of the problem and whether or not repeated states are expected.
Tree Representation
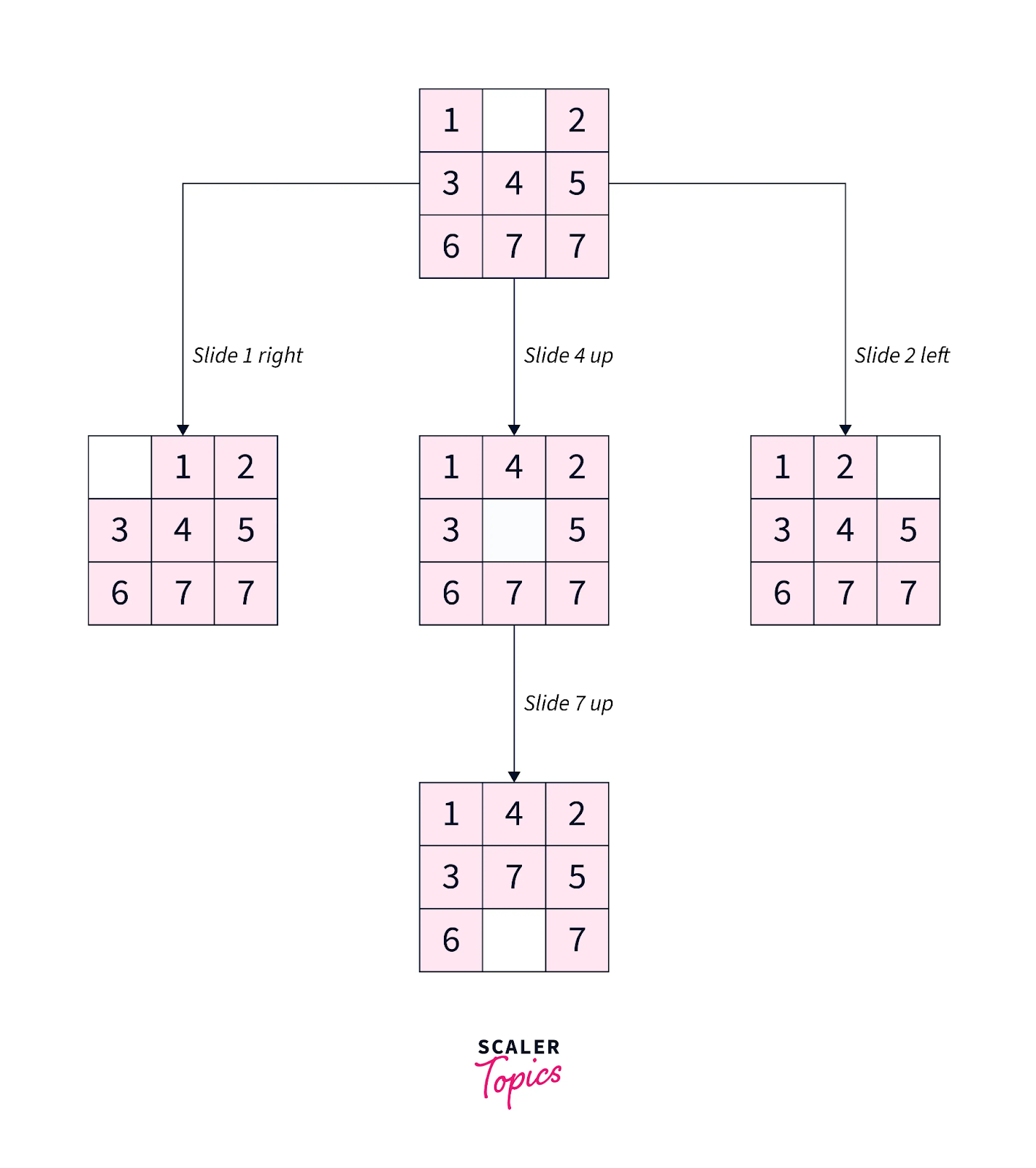
A tree represents the state space as a hierarchy where the root node is the initial state, and each child node is a new state resulting from a possible action. The branches represent transitions between states, and leaves represent either goal states or states with no further possible moves. Trees are often used when the problem has no loops or repeated states.
- Example: In the 8-puzzle problem, each state is a configuration of the tiles, and moving a tile creates a new child node in the tree. The search proceeds by exploring these nodes until the goal state (solved puzzle) is found.
Graph Representation
A graph is a more flexible representation than a tree, as it allows states to be revisited. Graphs are used when states may loop back or when different paths can lead to the same state. Nodes represent states, and edges represent the transitions or actions between them.
- Example: In robot navigation, a graph may represent all possible positions the robot can occupy, with the edges representing possible movements. The graph approach helps prevent exploring repeated states unnecessarily.
Choosing the right representation depends on the nature of the problem, with graphs being more suitable for complex, cyclic state spaces, while trees work well in linear or layered problem spaces.
Search Strategies in State Space Search
Search strategies dictate how the system navigates through the state space to find the goal state. Two commonly used strategies are Breadth-First Search (BFS) and Depth-First Search (DFS).
Breadth-First Search (BFS)
Breadth-First Search (BFS) is an uninformed search strategy that explores all nodes at the current level before moving on to the next level. It systematically expands the shallowest (or least deep) unvisited nodes in the search tree, ensuring that the first goal state found is the one with the shortest path from the initial state.
- Example: In the 8-puzzle problem, BFS would begin by exploring all possible moves from the initial configuration before expanding the next set of possible moves. This ensures that the solution found will have the minimum number of moves, assuming that all moves have equal cost.
BFS guarantees finding the shortest solution but can consume significant memory, as it needs to store all nodes at the current level before moving to the next.
Depth-First Search (DFS)
Depth-First Search (DFS) is another uninformed search strategy, but instead of exploring all nodes at a given level, DFS explores as far down a path as possible before backtracking. DFS proceeds by expanding the deepest unvisited node and continues down the tree until it reaches a dead end (a state with no further moves or the goal state), at which point it backtracks to explore other branches.
- Example: In the 8-puzzle problem, DFS may follow one sequence of moves to its depth before backtracking to explore other possible moves. This approach is less memory-intensive than BFS but may not always find the shortest solution.
DFS is suitable for problems where finding any solution is more important than finding the optimal solution, but it can become inefficient in deep or infinite search spaces.
Heuristics in State Space Search
Heuristics play a crucial role in informed search strategies, helping guide the search process more efficiently by estimating the “closeness” of a state to the goal state. Heuristic functions provide valuable insights, allowing the system to prioritize certain paths over others based on estimated cost or distance to the goal.
Manhattan Distance
One common heuristic in AI is the Manhattan distance, which is often used in problems like the 8-puzzle. The Manhattan distance calculates the sum of the vertical and horizontal distances between tiles and their goal positions, helping to estimate how many moves are left to solve the puzzle.
- Example: In a partially solved 8-puzzle, the Manhattan distance helps prioritize moves that will bring tiles closer to their correct positions.
Informed vs Uninformed Search
In uninformed search (like BFS and DFS), the system explores nodes without any prior knowledge of the goal’s location, resulting in more exhaustive searches. In contrast, informed search uses heuristics to evaluate which states are more promising, significantly reducing the number of nodes that need to be explored.
- Example: The A* algorithm uses a combination of the actual path cost (g(n)) and the estimated cost to the goal (h(n)) to prioritize nodes, ensuring both efficiency and optimality in the search process.
Applications of State Space Search
State space search is fundamental to many AI applications, where problem-solving, planning, and decision-making are required.
1. Robotics
- In robotics, state space search is used for pathfinding and navigation tasks. Robots often need to navigate through complex environments, and state space search helps them find the optimal path while avoiding obstacles. The robot’s position and possible movements are represented as nodes and transitions in the state space.
2. Automated Planning
- State space search plays a key role in automated planning systems, which are used to determine sequences of actions that will achieve specific goals. These systems are common in industries like manufacturing and logistics, where optimizing workflows is critical.
3. Gaming
- In game AI, state space search is used to explore possible game moves and strategies. For example, in chess or other board games, AI systems use state space search to evaluate possible future moves and choose the best one based on a heuristic evaluation function.
Challenges in State Space Search
State space search faces several challenges, especially when dealing with complex or large problem spaces:
1. State Space Explosion
One of the most significant challenges in state space search is state space explosion, where the number of possible states grows exponentially. As the size of the problem increases, the number of nodes the system must explore becomes impractical.
- Example: In chess, the number of possible board configurations is astronomically large, making it impossible to explore every possible state.
2. Computational Complexity
State space search algorithms can be computationally expensive, both in terms of time and memory usage. Breadth-First Search consumes large amounts of memory to store all nodes at a given depth, while Depth-First Search may become inefficient in large or deep search spaces.
To address these challenges, optimization techniques like pruning and the use of heuristics are essential. Algorithms like A* use heuristics to focus the search on more promising paths, helping mitigate the effects of state space explosion.
Conclusion
State space search is essential in AI, providing a structured approach to problem-solving by exploring possible states and transitions. It forms the basis for applications like robotics, gaming, and automated planning. Despite challenges like state space explosion and computational complexity, techniques such as heuristics and informed search algorithms like A* optimize the process, making it feasible for real-world problems. As AI systems continue to evolve, state space search remains a crucial tool, enabling intelligent decision-making and efficient navigation through vast problem spaces.
References:
- State Space Search In Artificial Intelligence – Scaler Topics
- State Space Search in Artificial Intelligence