In the world of artificial intelligence (AI), search algorithms play a critical role in finding solutions to complex problems, especially in pathfinding. Among these algorithms, the A Search Algorithm* stands out as one of the most efficient and widely used, especially in fields like robotics, gaming, and navigation. Its ability to find the shortest path by combining heuristic estimates with the actual cost sets it apart from traditional search algorithms like Dijkstra’s Algorithm or Breadth-First Search (BFS). This guide delves into the A* algorithm, providing an in-depth look at how it works, its importance, and where it is used in real-world applications.
Understanding Pathfinding and Its Importance
Pathfinding is a fundamental process in AI where the objective is to find the most efficient route from a starting point to a destination. This process is crucial in various domains, such as navigation, robotics, and gaming, where AI systems must make decisions based on their current position and a desired endpoint.
Applications of Pathfinding Algorithms:
- Navigation: Pathfinding is essential in GPS systems to calculate the shortest or fastest route between two locations. Systems use algorithms like A* to constantly recalculate paths based on real-time traffic updates.
- Video Games: Many strategy games rely on AI characters that need to navigate terrain or obstacles to reach a goal. Games like StarCraft use pathfinding to control character movement.
- Robotics: Autonomous robots, such as vacuum cleaners or delivery drones, require pathfinding to avoid obstacles and navigate efficiently in dynamic environments.
In all these scenarios, pathfinding ensures that systems find not just any route, but the optimal route, minimizing cost (time, distance, or energy). The A* algorithm is highly favored for this task due to its balance between accuracy and efficiency, leveraging both actual movement cost and estimated future cost through heuristics.
What is the A* Algorithm in AI?
The A* algorithm is a widely used pathfinding algorithm in AI, designed to find the most efficient route between two points. It improves on earlier algorithms like Dijkstra’s Algorithm by incorporating a heuristic that estimates the cost of reaching the goal from any given node, making it more efficient in terms of computational time.
History and Development:
Developed by Peter Hart, Nils Nilsson, and Bertram Raphael in 1968, A* was introduced as an extension of Dijkstra’s Algorithm with a focus on improving efficiency through the use of heuristics. It quickly gained popularity due to its versatility in solving real-world pathfinding problems, particularly in domains that required quick, accurate routing.
Why A* is More Efficient:
Unlike Breadth-First Search (BFS) or Depth-First Search (DFS), which explore all nodes indiscriminately, A* prioritizes nodes that are likely to lead to the goal by balancing two factors:
- g(n): The actual cost of reaching node n from the start.
- h(n): The heuristic estimate of the cost to reach the goal from node n.
This combination allows A* to be both optimal and efficient, making it the go-to algorithm for applications that require rapid pathfinding with high accuracy.
Detailed Explanation of the A* Algorithm
Initialization
- Define the start node and goal node.
- Initialize two lists: open list (nodes to be evaluated) and closed list (nodes already evaluated).
- Add the start node to the open list and set its g(n) to 0 (cost from start to current node) and h(n) as the estimated cost to the goal.
Main Loop
- Repeat the process until the open list is empty or the goal is reached.
- In each iteration, pick the node from the open list with the lowest f(n), where f(n) = g(n) + h(n).
- Move this node to the closed list, as it has now been evaluated.
Selecting the Node for Evaluation
- The node with the smallest f(n) is selected for evaluation from the open list. This ensures that the algorithm prioritizes nodes that seem closer to the goal, based on the cost incurred so far (g(n)) and the estimated remaining cost (h(n)).
Evaluating Neighbors
- For each neighboring node of the selected node, calculate the tentative g(n) (actual cost).
- If the neighbor is not in the open list, add it and set its g(n) and h(n) values.
- If the neighbor is already in the open list but the new path offers a lower g(n), update its cost and parent node.
Updating Costs (g(n), h(n), f(n))
- g(n): The exact cost to reach the current node from the start.
- h(n): The estimated cost to reach the goal from the current node (heuristic).
- f(n): The total cost of the current path, calculated as f(n) = g(n) + h(n).
- Update these values for each node based on the path being evaluated.
Moving to the Next Node
- After evaluating all neighbors, the algorithm moves to the next node with the lowest f(n) in the open list.
- This ensures that the search is directed toward the goal in the most cost-effective way.
Goal Reached or No Path Found
- The algorithm terminates when the goal node is reached, meaning the path has been successfully found.
- If the open list is empty and the goal has not been reached, it means no path exists between the start and the goal.
Path Reconstruction (Optional)
- Once the goal is reached, trace back through the parent nodes to reconstruct the final path from the start to the goal.
- This step provides the actual route taken by the algorithm to reach the goal, showing the sequence of nodes in the optimal path.
Pseudocode for the A* Algorithm
The A* algorithm operates by combining g(n), the actual cost from the start node to the current node, and h(n), the estimated cost from the current node to the goal node (heuristic). Below is a step-by-step breakdown of the pseudocode for the A* Algorithm:
Step-by-Step Pseudocode:
- Initialize the Open and Closed Lists:
- Open List contains nodes to be evaluated.
- Closed List contains nodes that have already been evaluated.
- Add the start node to the Open List.
- Loop until the Open List is empty or the goal is reached:
- Select the node from the Open List with the lowest f(n), where f(n) = g(n) + h(n).
- If the current node is the goal, reconstruct the path and return it.
- For the selected node:
- Remove it from the Open List and add it to the Closed List.
- Evaluate all neighboring nodes:
- If a neighbor is in the Closed List, skip it.
- If a neighbor is in the Open List, check if this path is better (lower g(n)); update if necessary.
- Otherwise, calculate g(n), h(n), and f(n), then add the neighbor to the Open List.
- End the loop once the goal is reached or the Open List is empty (no path found).
- Return the reconstructed path or indicate that no valid path exists.
Explanation of Key Steps:
- Initialization: Preparing lists to track nodes.
- Node Selection: Choosing the node with the least cost (f-value).
- Pathfinding: Moving to neighboring nodes, updating costs, and reconstructing the path.
This pseudocode provides a high-level understanding of how A* navigates through nodes to find the most efficient path.
Understanding Heuristics in A*
Heuristics play a crucial role in the A* algorithm. They help the algorithm estimate the cost from the current node to the goal and guide the search towards the most promising paths.
The Role of Heuristics
- Heuristics allow A* to focus the search on the most likely paths to the goal by using h(n), which estimates the cost from the current node to the goal. Without heuristics, A* would behave like Dijkstra’s Algorithm, exploring all possible paths without any prioritization.
The Heuristic Function (h(n))
- The heuristic function, denoted h(n), estimates the cost to reach the goal from the current node. This function should never overestimate the true cost to ensure that A* remains admissible (i.e., guaranteed to find the shortest path).
Common Heuristics in A*
Several heuristics can be used in A*, depending on the structure of the problem:
1. Manhattan Distance:
Used in grid-based problems, where movements are restricted to horizontal and vertical directions.
Formula:
$$h(n) = |x_{goal} – x_{current}| + |y_{goal} – y_{current}|$$
2. Euclidean Distance:
Used when movement is allowed in any direction, accounting for the straight-line distance between two points.
Formula:
$$h(n) = \sqrt{(x_{goal} – x_{current})^2 + (y_{goal} – y_{current})^2}$$
3. Diagonal Distance:
Suitable for grid-based systems that allow diagonal movements.
Formula:
$$h(n) = \text{max}(|x_{goal} – x_{current}|, |y_{goal} – y_{current}|)$$
Impact of Heuristic Choice on Performance
The choice of heuristic directly impacts the performance of the A* algorithm. A well-chosen heuristic will speed up the search process by focusing the search in the right direction, while a poor heuristic can lead to inefficiencies by causing the algorithm to explore unnecessary nodes.
Choosing the Right Heuristic
- Manhattan Distance is ideal for problems with grid-based layouts and no diagonal movements.
- Euclidean Distance is suitable when diagonal or any-direction movement is allowed.
- Diagonal Distance is used for grid problems with diagonal movements allowed.
Choosing the right heuristic depends on the nature of the environment and the problem at hand.
Source: AlmaBetter
Full Implementation of A* Algorithm in Python
The following is a full implementation of the A* algorithm in Python. This code handles grid-based pathfinding and includes heuristic calculations.
import heapq
# Node class to store coordinates and costs
class Node:
def __init__(self, x, y, g=0, h=0, parent=None):
self.x = x
self.y = y
self.g = g # Cost from start to node
self.h = h # Heuristic cost from node to goal
self.f = g + h # Total cost
self.parent = parent
def __lt__(self, other):
return self.f < other.f
# Heuristic function (Manhattan Distance)
def heuristic(current, goal):
return abs(current.x - goal.x) + abs(current.y - goal.y)
# A* search algorithm
def a_star(grid, start, goal):
open_list = []
closed_list = set()
heapq.heappush(open_list, Node(start[0], start[1], 0, heuristic(start, goal)))
while open_list:
current = heapq.heappop(open_list)
if (current.x, current.y) == goal:
path = []
while current:
path.append((current.x, current.y))
current = current.parent
return path[::-1] # Return reversed path
closed_list.add((current.x, current.y))
for dx, dy in [(-1, 0), (1, 0), (0, -1), (0, 1)]:
neighbor_x, neighbor_y = current.x + dx, current.y + dy
if (neighbor_x, neighbor_y) in closed_list or not is_walkable(grid, neighbor_x, neighbor_y):
continue
g = current.g + 1
h = heuristic((neighbor_x, neighbor_y), goal)
neighbor = Node(neighbor_x, neighbor_y, g, h, current)
heapq.heappush(open_list, neighbor)
return None # No path found
# Helper function to check if a node is walkable
def is_walkable(grid, x, y):
return 0 <= x < len(grid) and 0 <= y < len(grid[0]) and grid[x][y] == 0
# Example grid: 0 = walkable, 1 = obstacle
grid = [
[0, 0, 0, 1, 0],
[0, 1, 0, 1, 0],
[0, 1, 0, 0, 0],
[0, 0, 0, 1, 0],
[1, 0, 0, 0, 0]
]
start = (0, 0)
goal = (4, 4)
path = a_star(grid, start, goal)
print("Path:", path)Sample Output
This implementation finds the optimal path from the start point (0, 0) to the goal (4, 4) in the grid:
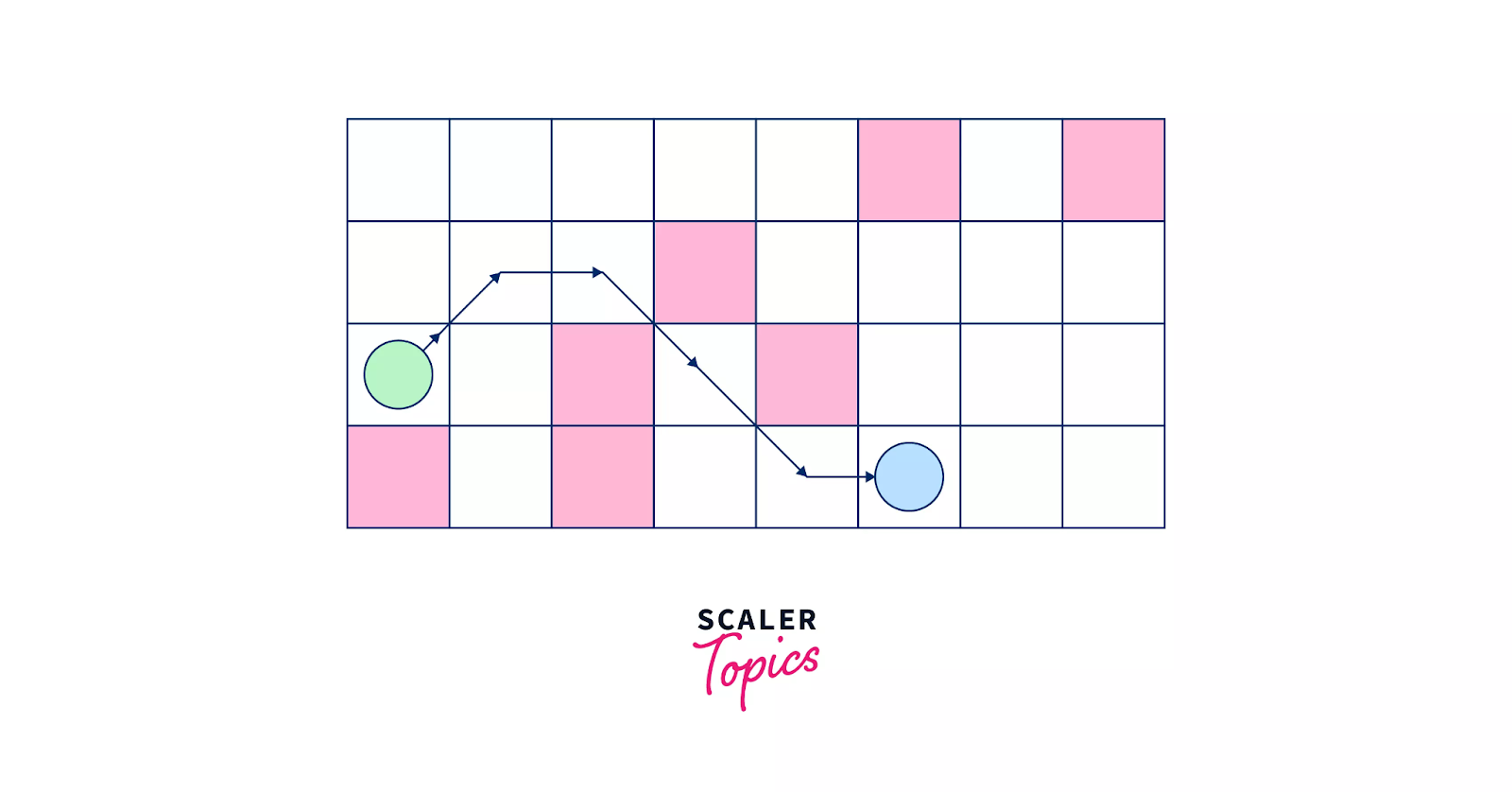
Path: [(0, 0), (1, 0), (2, 0), (3, 0), (3, 1), (4, 1), (4, 2), (4, 3), (4, 4)]Visual Representation of the Pathfinding Process
A visual representation of the grid and the path found can help in understanding how the A* algorithm navigates the nodes. Tools like Matplotlib or Pygame can be used to display the grid and the path step-by-step.
Real-world Applications of A* Algorithm
The A* algorithm is widely applied in various industries due to its ability to efficiently find the shortest path between two points while considering cost and distance. Below are some of the key real-world applications of A* across different fields:
1. GPS Navigation
One of the most well-known applications of A* is in GPS navigation systems. These systems rely on A* to calculate the shortest and most efficient route between two locations while accounting for various factors like traffic, road conditions, and travel time.
- Example: In applications like Google Maps, A* helps determine the optimal driving or walking route, avoiding congested roads and reducing travel time.
- How it works: A* uses real-time data to update the path dynamically, recalculating as needed to adapt to changing traffic patterns. The algorithm ensures that users are always guided via the quickest available route to their destination.
GPS navigation showcases the real-time capabilities of A*, highlighting its ability to adapt to new data and changing environments.
2. Video Games
In the video game industry, A* is extensively used for pathfinding and controlling AI characters. Game environments often consist of grid-based maps with obstacles, and A* is the algorithm of choice for determining the shortest path for in-game characters.
- Strategy Games: Games like StarCraft and Age of Empires use A* to help AI-controlled units navigate through complex maps, avoiding obstacles and enemy units.
- NPC Pathfinding: Non-player characters (NPCs) in open-world games also rely on A* to move efficiently and respond to player actions, such as navigating through buildings or avoiding hazards.
A* ensures that characters move realistically and efficiently, enhancing the player experience by providing smooth and intelligent navigation.
3. Robotics
Robotics is another field where A* plays a critical role, especially in navigation and motion planning for autonomous robots. Robots in various environments, such as warehouses or hospitals, need to navigate through spaces filled with obstacles, and A* helps them find the optimal path.
- Autonomous Robots: Robots use A* to navigate through predefined environments by calculating the shortest route to their destination while avoiding dynamic obstacles.
- Drones and UAVs: Drones and unmanned aerial vehicles (UAVs) apply A* for pathfinding, ensuring safe flight paths over complex terrains or populated areas.
A* is particularly useful in robotics because it allows robots to navigate both static and dynamic environments while optimizing travel paths, ensuring efficient and safe operations.
4. Network Routing
In network routing, A* helps optimize the flow of data across interconnected networks by calculating the most efficient route for data packets. This is crucial for minimizing latency and ensuring smooth communication between devices in a network.
- Internet Traffic: A* finds the optimal path for data packets in large networks, ensuring that they are transmitted with minimal delays.
- Optimizing Bandwidth Usage: In large-scale networks, A* can help distribute network traffic more evenly, preventing bottlenecks and improving overall performance.
By optimizing packet routing, A* ensures that network resources are used efficiently, reducing transmission time and enhancing overall network reliability.
5. Supply Chain Management
In supply chain management, A* is used to optimize routes for delivery vehicles, ensuring timely deliveries while minimizing costs. By calculating the most efficient routes, A* helps logistics companies reduce fuel consumption and improve delivery times.
- Route Optimization: A* is used to determine the shortest delivery paths for trucks, minimizing travel distance and reducing operational costs.
- Warehouse Navigation: In warehouses, A* helps robots navigate through aisles to pick and transport goods, improving productivity and efficiency.
The algorithm ensures that deliveries are made on time and with minimal expense, making it an essential tool for logistics and supply chain operations.
6. Urban Planning
Urban planners use A* to map out optimal infrastructure routes for new roads, public transportation systems, and utilities. The algorithm helps them determine the most efficient paths while considering various constraints such as terrain, existing infrastructure, and environmental impact.
- Road Network Design: A* is applied to optimize the layout of new road networks, ensuring that traffic flows efficiently and that the design meets future demand.
- Public Transport Planning: Urban planners also use A* to design bus or subway routes that minimize travel time for passengers while maximizing coverage of the city.
In urban planning, A* helps ensure that cities are designed to be both efficient and sustainable, with optimized traffic flow and minimized environmental impact.
Advantages and Disadvantages of A* Algorithm in AI
Advantages
- Optimality: One of the major advantages of the A* algorithm is that it guarantees finding the optimal path if the heuristic function is admissible (i.e., it never overestimates the actual cost). This ensures that A* finds the most efficient solution possible in terms of cost and distance.
- Efficiency: A* combines the benefits of both Dijkstra’s algorithm and best-first search, making it highly efficient. By balancing between the actual cost from the start node and the heuristic estimate to the goal, A* reduces unnecessary exploration of nodes, speeding up the search process.
- Flexibility: A* is highly flexible because it can be adapted for various problem domains. It can work with different types of heuristics, allowing it to be used in grid-based pathfinding, graph traversal, and more complex navigation problems.
- Real-Time Adaptations: A* can be modified for use in dynamic environments through variations like Real-Time A* and Iterative Deepening A*, allowing it to handle environments that change in real time.
Disadvantages
- Memory Usage: A* has high memory usage because it stores all generated nodes in memory. This makes it unsuitable for large search spaces, particularly in memory-constrained environments. The need to maintain the open and closed lists results in substantial memory consumption.
- Time Complexity: In the worst-case scenario, A* has exponential time complexity $(O(b^d))$, where b is the branching factor and d is the depth of the solution. If the heuristic is not well-chosen, A* may take a long time to find the solution, especially in large or complex search spaces.
- Heuristic Sensitivity: The performance of A* depends heavily on the quality of the heuristic function. A poorly designed heuristic can lead to inefficient searches, as the algorithm may explore many unnecessary nodes.
- Limited Use in Infinite Search Spaces: A* is not well-suited for infinite search spaces due to its memory and time requirements. When applied to infinite spaces, the algorithm may struggle to converge on a solution in a reasonable time frame.
Conclusion
The A* algorithm is one of the most powerful and versatile search algorithms used in artificial intelligence, offering both optimality and efficiency. By leveraging a combination of the actual cost from the start node and an estimated cost to the goal (heuristic), A* efficiently narrows down the search space, making it a highly effective solution for pathfinding and graph traversal problems.
One of the key strengths of A* is its flexibility. It can be adapted to various real-world applications, from GPS navigation systems and video games to robotics, network routing, and supply chain management. Its optimality guarantees make it the go-to algorithm for tasks where finding the shortest or most efficient path is critical.
However, A* is not without its limitations. It requires significant memory, especially in large or complex search spaces. Moreover, its performance is highly dependent on the quality of the heuristic used. Poorly chosen heuristics can lead to inefficient searches and increased computational costs.
In conclusion, A* remains one of the most widely used and respected algorithms in AI due to its balance between optimality and efficiency. Whether applied in static or dynamic environments, it continues to be a cornerstone in the fields of pathfinding and AI-driven decision-making. As technology advances, further adaptations of the A* algorithm will continue to emerge, offering even greater performance and efficiency for solving complex real-world problems.
References: